
Blight: Wireless LED Box
This project started as a custom built LED light box. The brainchild of John Baldwin, the idea was simple: make a handled cube with LEDs, and change the lights based on the movement of the box. By the end, we had a platform that would allow us to make multiple LED boxes act in unison.
Architecture
Blight consists of a master process and multiple node processes, where each node corresponds to a controllable LED box.
- Control of the LEDs, as well as readings from the IMU, are done over I2C using the Pi4J library.
- Communication between the nodes and master is done using Netty and UDT.
- The UI is built using various libraries, including Angular, three.js, and D3.js.
flowchart TD
bm[blight-master]
subgraph node
bn[blight-node]
subgraph IMU
subgraph L3GD20H
gyroscope
end
subgraph L3GD20
accelerometer
magnetometer
end
subgraph BMP180
barometer
end
end
bn --> IMU
bn --> LED
bn --> Battery
bn --> WiFi
end
ac[Access Point]
WiFi --> ac
bm --> ac
ui[Web UI] --> bm
Through the UI, the user can submit a JavaScript control script that is sent and executed on any of the connected nodes. Using the API exposed to the control script, the user can subscribe to IMU telemetry and control the state of the connected LED strip.
blight-master
The master process runs on a machine that is connected to the same network as the WiFi access point used by the nodes. The nodes are discovered by the master using UDP messages that are broadcast until a connection is established. The UI is served by the master process and can be used to view and control the connected nodes.
blight-node
The LED box consists of a RaspberryPi, battery, WiFi dongle, RGB LED strip, and a 10 DOF IMU.
The RaspberryPi needs to be pre-configured to connect to a WiFi access point (Internet optional) with a
systemd service that starts blight-node once networking is ready.
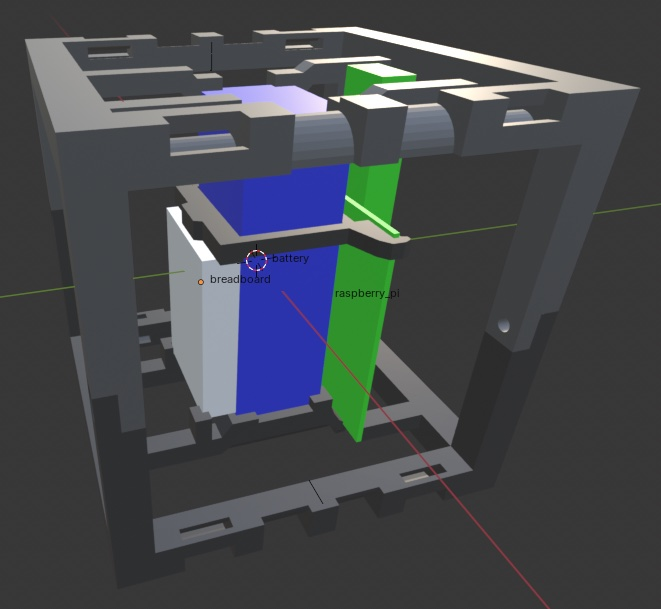
Hardware
I designed a box in Blender to mount all the components, with guides for the LED strip. The box consists of two parts that can be 3D printed and then glued or screwed together.
L3GD20H: Gyroscope
LSM303DLHC: Accelerometer and Magnetometer
BMP180: Barometer
Resources
Spatial localization resources:
- Indoor Location Tracking Using Received Signal Strength Indicator
- RSSI-Based Indoor Localization and Tracking Using Sigma-Point Kalman Smoothers
- Pedestrian localisation for indoor environments
- Wi-Fi Localization Using RSSI Fingerprinting
- Improving motion tracking using gyroscope data in AR applications
- Implementing Positioning Algorithms Using Accelerometers
Resources on detecting patterned behavior. Specifically taps, knocks, and possibly gestures: